De vector algebra is een tak van de wiskunde die verantwoordelijk is voor het bestuderen van systemen van lineaire vergelijkingen, vectoren, matrices, vectorruimten en hun lineaire transformaties. Het is gerelateerd aan gebieden zoals engineering, resolutie van differentiaalvergelijkingen, functionele analyse, operationeel onderzoek, computergraphics, onder anderen..
Een ander gebied dat lineaire algebra heeft overgenomen, is de fysica, omdat het hierdoor mogelijk is geweest om de studie van fysische verschijnselen te ontwikkelen en ze te beschrijven door het gebruik van vectoren. Dit heeft een beter begrip van het universum mogelijk gemaakt.
Artikel index
Vectoralgebra is ontstaan uit de studie van quaternionen (uitbreiding van reële getallen) 1, i, j en k, evenals uit de Cartesiaanse geometrie die gepromoot wordt door Gibbs en Heaviside, die zich realiseerden dat vectoren zouden dienen als een instrument om verschillende fysische verschijnselen weer te geven..
Vectoralgebra wordt bestudeerd aan de hand van drie grondbeginselen:
Vectoren worden weergegeven door lijnen die een oriëntatie hebben, en bewerkingen zoals optellen, aftrekken en vermenigvuldigen met reële getallen worden gedefinieerd door middel van geometrische methoden..
De beschrijving van vectoren en hun bewerkingen gebeurt met getallen, componenten genaamd. Dit type beschrijving is het resultaat van een geometrische weergave omdat een coördinatensysteem wordt gebruikt.
Er wordt een beschrijving van de vectoren gemaakt, ongeacht het coördinatensysteem of elk type geometrische representatie.
De studie van figuren in de ruimte gebeurt door hun weergave in een referentiesysteem, dat in een of meer dimensies kan zijn. Tot de belangrijkste systemen behoren:
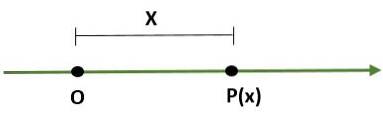
- Eendimensionaal systeem, een lijn waarbij een punt (O) de oorsprong vertegenwoordigt en een ander punt (P) de schaal (lengte) en de richting ervan bepaalt:
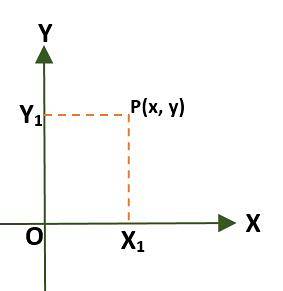
- Rechthoekig coördinatensysteem (tweedimensionaal), dat bestaat uit twee loodrechte lijnen, de x-as en de y-as, die door een punt (O) -oorsprong gaan; op deze manier wordt het vlak verdeeld in vier gebieden die kwadranten worden genoemd. In dit geval wordt een punt (P) in het vlak gegeven door de afstanden die bestaan tussen de assen en P.
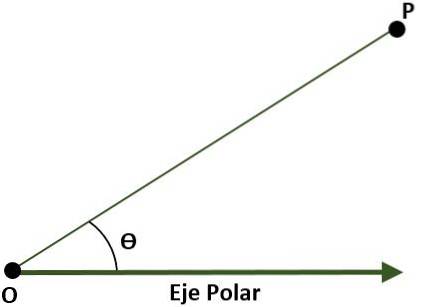
- Polair coördinatensysteem (tweedimensionaal). In dit geval bestaat het systeem uit een punt O (oorsprong) dat de pool wordt genoemd en een straal met oorsprong in O, de poolas. In dit geval wordt het punt P van het vlak, met verwijzing naar de pool en de poolas, gegeven door de hoek (Ɵ), die wordt gevormd door de afstand tussen de oorsprong en het punt P.
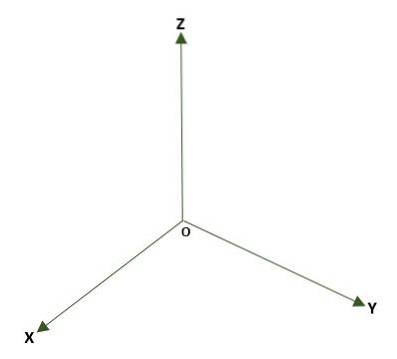
- Rechthoekig driedimensionaal systeem, gevormd door drie loodrechte lijnen (x, y, z) waarvan de oorsprong een punt O in de ruimte is. Er worden drie coördinatenvlakken gevormd: xy, xz en yz; de ruimte wordt opgedeeld in acht regio's die octanten worden genoemd. De referentie van een punt P in de ruimte wordt gegeven door de afstanden die bestaan tussen de vlakken en P.
Een magnitude is een fysieke grootheid die kan worden geteld of gemeten via een numerieke waarde, zoals in het geval van sommige fysieke verschijnselen; het is echter vaak nodig om deze verschijnselen te kunnen beschrijven met andere dan numerieke factoren. Dat is de reden waarom de magnitudes in twee typen worden ingedeeld:
Het zijn die hoeveelheden die numeriek worden gedefinieerd en weergegeven; dat wil zeggen door een module samen met een maateenheid. Bijvoorbeeld:
a) Tijd: 5 seconden.
b) Gewicht: 10 kg.
c) Inhoud: 40 ml.
d) Temperatuur: 40 ºC.
Het zijn die grootheden die worden gedefinieerd en weergegeven door een module samen met een eenheid, evenals door een gevoel en richting. Bijvoorbeeld:
a) Snelheid: (5ȋ - 3ĵ) m / s.
b) Versnelling: 13 m / stweeS 45 º E.
c) Kracht: 280 N, 120º.
d) Gewicht: -40 ĵ kg-f.
Vectorgrootheden worden grafisch weergegeven door vectoren.
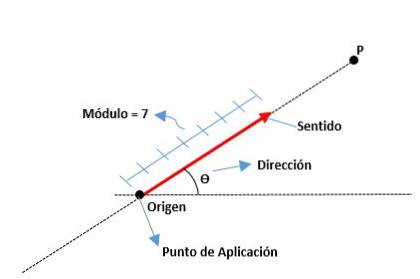
Vectoren zijn grafische weergaven van een vectorgrootheid; dat wil zeggen, het zijn lijnsegmenten waarvan het uiteinde de punt van een pijl is.
Deze worden bepaald door de module- of segmentlengte, de richting, die wordt aangegeven door de punt van de pijl, en de richting volgens de lijn waartoe het behoort. De oorsprong van een vector wordt ook wel het toepassingspunt genoemd.
De elementen van een vector zijn als volgt:
Het is de afstand van de oorsprong tot het einde van een vector, weergegeven door een reëel getal samen met een eenheid. Bijvoorbeeld:
| OM | = | A | = A = 6 cm
Het is de maat van de hoek die bestaat tussen de x-as (van de positieve) en de vector, evenals de windstreken (noord, zuid, oost en west) die worden gebruikt.
Het wordt gegeven door de pijlpunt aan het einde van de vector, die aangeeft waar het naartoe gaat.
Over het algemeen worden vectoren geclassificeerd als:
Het is er een waarvan het toepassingspunt (oorsprong) vaststaat; dat wil zeggen, het blijft verbonden met een punt in de ruimte, dus het kan hierin niet bewegen.
Het kan vrij in de ruimte bewegen omdat zijn oorsprong naar elk punt beweegt zonder zijn module, richting of richting te veranderen..
Het is er een die zijn oorsprong langs zijn actielijn kan overbrengen zonder zijn module, richting of richting te veranderen..
Een van de belangrijkste eigenschappen van vectoren zijn de volgende:
Het zijn die vrije vectoren die dezelfde module, richting (of ze zijn parallel) en gevoel hebben als een glijdende vector of een vaste vector.
Het treedt op wanneer twee vectoren dezelfde richting hebben (of parallel zijn), dezelfde betekenis hebben en ondanks verschillende modules en toepassingspunten, dezelfde effecten veroorzaken.
Deze hebben dezelfde module, richting en betekenis, zelfs als hun startpunten verschillend zijn, waardoor een parallelle vector zichzelf kan vertalen zonder deze te beïnvloeden..
Het zijn degenen die dezelfde module en richting hebben, maar hun gevoel is tegengesteld.
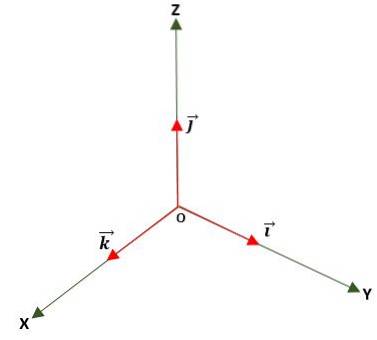
Het is er een waarin de module gelijk is aan de eenheid (1). Dit wordt verkregen door de vector te delen door zijn module en wordt gebruikt om de richting en richting van een vector te bepalen, hetzij in het vlak of in de ruimte, met behulp van de basis- of genormaliseerde eenheidsvectoren, die zijn:
Het is degene waarvan de modulus gelijk is aan 0; dat wil zeggen, het punt van oorsprong en het einde vallen samen op hetzelfde punt.
De componenten van een vector zijn die waarden van de vectorprojecties op de assen van het referentiesysteem; Afhankelijk van de ontleding van de vector, die zich op twee- of driedimensionale assen kan bevinden, worden respectievelijk twee of drie componenten verkregen..
De componenten van een vector zijn reële getallen, die positief, negatief of zelfs nul kunnen zijn (0).
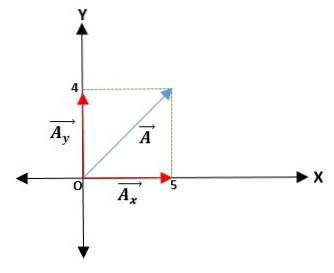
Als we dus een vector Ā hebben, met oorsprong in een rechthoekig coördinatensysteem in het xy-vlak (tweedimensionaal), is de projectie op de x-as Āx en de projectie op de y-as Āy. De vector wordt dus uitgedrukt als de som van de samenstellende vectoren.
We hebben een vector Ā die begint bij de oorsprong en de coördinaten van de uiteinden worden gegeven. Dus de vector Ā = (ĀXNAARY) = (4; 5) cm.
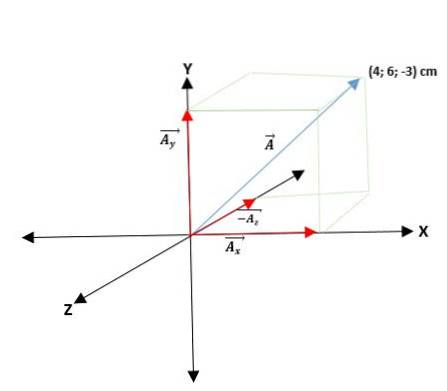
Als de vector Ā werkt aan de oorsprong van een driedimensionaal driehoekig coördinatensysteem (in de ruimte) x, y, z, naar een ander punt (P), zullen de projecties op zijn assen Āx, Āy en Āz zijn; de vector wordt dus uitgedrukt als de som van de drie samenstellende vectoren.
We hebben een vector Ā die begint bij de oorsprong en de coördinaten van de uiteinden worden gegeven. Dus de vector Ā = (AXNAARY; NAARz) = (4; 6; -3) cm.
Vectoren met hun rechthoekige coördinaten kunnen worden uitgedrukt in termen van hun basisvectoren. Daarvoor hoef je alleen elke coördinaat te vermenigvuldigen met zijn respectieve eenheidsvector, zodanig dat ze voor het vlak en de ruimte de volgende zijn:
Voor het vliegtuig: Ā = AXik + AYj.
Voor de spatie: Ā = AXik + AYj + Azk.
Er zijn veel grootheden die een module, gevoel en richting hebben, zoals versnelling, snelheid, verplaatsing, kracht, onder anderen..
Deze worden op verschillende wetenschapsgebieden toegepast en om ze toe te passen is het in sommige gevallen nodig om bewerkingen uit te voeren zoals optellen, aftrekken, vermenigvuldigen en delen van vectoren en scalairen..
Het optellen en aftrekken van vectoren wordt beschouwd als een enkele algebraïsche bewerking omdat het aftrekken kan worden geschreven als een som; het aftrekken van de vectoren Ā en Ē kan bijvoorbeeld worden uitgedrukt als:
Ā - Ē = Ā + (-Ē)
Er zijn verschillende methoden om vectoren op te tellen en af te trekken: ze kunnen grafisch of analytisch zijn.
Wordt gebruikt als een vector een module, gevoel en richting heeft. Hiervoor worden lijnen getrokken die een figuur vormen die later helpen bij het bepalen van het resultaat. Een van de bekendste zijn de volgende:
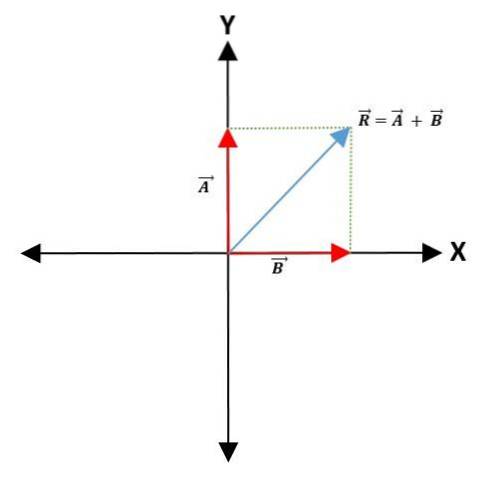
Om twee vectoren op te tellen of af te trekken, wordt een gemeenschappelijk punt op de coördinaatas gekozen -die het punt van oorsprong van de vectoren vertegenwoordigt-, waarbij de module, richting en richting behouden blijven..
Lijnen worden vervolgens parallel aan de vectoren getekend om een parallellogram te vormen. De resulterende vector is de diagonaal die loopt van het punt van oorsprong van beide vectoren naar de top van het parallellogram:
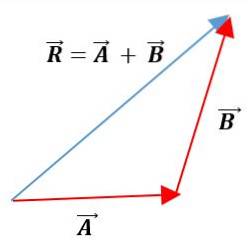
Bij deze methode worden de vectoren achter elkaar geplaatst, met behoud van hun modules, richtingen en richtingen. De resulterende vector is de vereniging van de oorsprong van de eerste vector met het einde van de tweede vector:
Twee of meer vectoren kunnen worden opgeteld of afgetrokken via een geometrische of vectormethode:
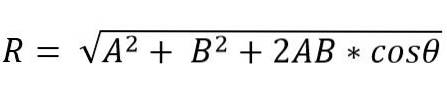
Wanneer twee vectoren een driehoek of parallellogram vormen, kunnen de modulus en richting van de resulterende vector worden bepaald met behulp van de wetten van sinus en cosinus. De module van de resulterende vector, die de cosinuswet en de driehoeksmethode toepast, wordt dus gegeven door:
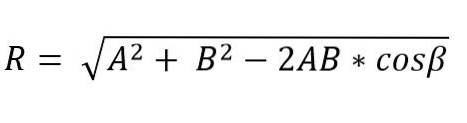
In deze formule is β de hoek tegenover de zijde R, en deze is gelijk aan 180º - Ɵ.
In plaats daarvan is volgens de parallellogrammethode de modulus van de resulterende vector:
De richting van de resulterende vector wordt gegeven door de hoek (α), die de resultante vormt met een van de vectoren.
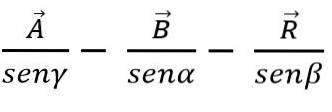
Volgens de wet van de sinus kan het optellen of aftrekken van vectoren ook worden gedaan door de driehoek- of parallellogrammethode, wetende dat in elke driehoek de zijden evenredig zijn met de sinussen van de hoeken:
Dit kan op twee manieren worden gedaan: afhankelijk van de rechthoekige coördinaten of de basisvectoren.
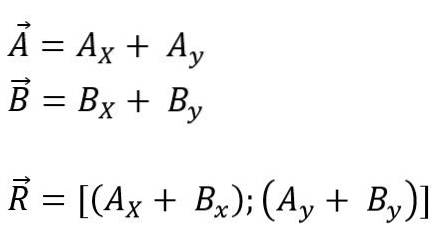
Het kan worden gedaan door de vectoren die moeten worden opgeteld of afgetrokken te vertalen naar de oorsprong van coördinaten, en vervolgens alle projecties op elk van de assen voor het vlak (x, y) of de ruimte (x en Z); Ten slotte worden de componenten algebraïsch toegevoegd. Dus voor het vliegtuig is het:
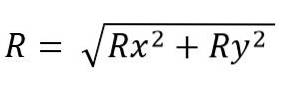
De modulus van de resulterende vector is:
Terwijl het voor ruimte is:
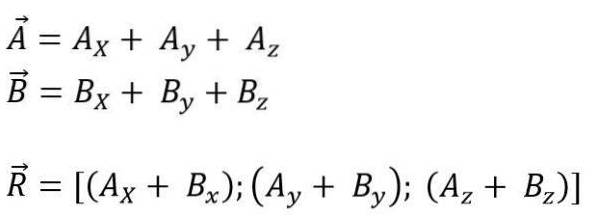
De modulus van de resulterende vector is:

Bij het uitvoeren van vectorsommen worden verschillende eigenschappen toegepast, namelijk:
- Associatieve eigenschap: de resultante verandert niet wanneer eerst twee vectoren worden toegevoegd en vervolgens een derde vector wordt toegevoegd.
- Commutatieve eigenschap: de volgorde van de vectoren verandert de resultante niet.
- Vector distributieve eigenschap: als een scalair wordt vermenigvuldigd met de som van twee vectoren, is deze gelijk aan de vermenigvuldiging van de scalair met elke vector.
- Scalaire distributieve eigenschap: als een vector wordt vermenigvuldigd met de som van twee scalairen, is deze gelijk aan de vermenigvuldiging van de vector voor elke scalair.
De vermenigvuldiging of het product van vectoren zou kunnen worden gedaan als optellen of aftrekken, maar als je het op die manier doet, verliest het de fysieke betekenis en wordt het bijna nooit gevonden in applicaties. Daarom zijn over het algemeen de meest gebruikte soorten producten het scalaire en vectorproduct.
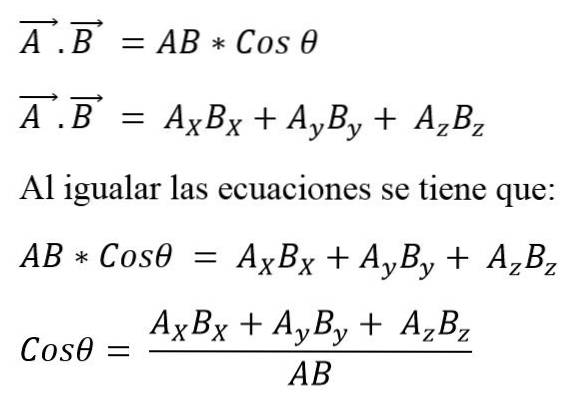
Het is ook bekend als het puntproduct van twee vectoren. Wanneer de modules van twee vectoren worden vermenigvuldigd met de cosinus van de kleinste hoek die ertussen wordt gevormd, wordt een scalair verkregen. Om een scalair product tussen twee vectoren uit te drukken, wordt er een punt tussen geplaatst, en dit kan worden gedefinieerd als:
De waarde van de hoek die tussen de twee vectoren bestaat, is afhankelijk van of ze parallel of loodrecht zijn; dus je moet:
- Als de vectoren parallel zijn en dezelfde betekenis hebben, cosinus 0º = 1.
- Als de vectoren parallel zijn en tegengestelde richtingen hebben, cosinus 180º = -1.
- Als de vectoren loodrecht staan, cosinus 90º = 0.
Die hoek kan ook worden berekend wetende dat:
Het puntproduct heeft de volgende eigenschappen:
- Commutatieve eigenschap: de volgorde van de vectoren verandert de scalair niet.
-Distributieve eigenschap: als een scalair wordt vermenigvuldigd met de som van twee vectoren, is deze gelijk aan de vermenigvuldiging van de scalair met elke vector.
Vectorvermenigvuldiging, of kruisproduct van twee vectoren A en B, zal resulteren in een nieuwe vector C en wordt uitgedrukt met een kruising tussen de vectoren:
De nieuwe vector zal zijn eigen kenmerken hebben. Op die manier:
- De richting: deze nieuwe vector staat loodrecht op het vlak, dat wordt bepaald door de originele vectoren.
- De richting: dit wordt bepaald met de rechterhandregel, waarbij vector A naar B wordt gedraaid, waarmee de draairichting met de vingers wordt aangegeven, en de richting van de vector wordt gemarkeerd met de duim.
- De module: wordt bepaald door de vermenigvuldiging van de modules van de vectoren AxB, door de sinus van de kleinste hoek die tussen deze vectoren bestaat. Het wordt uitgedrukt:
De waarde van de hoek die tussen de twee vectoren bestaat, is afhankelijk van of ze parallel of loodrecht zijn. Het is dus mogelijk om het volgende te vermelden:
- Als de vectoren parallel zijn en dezelfde betekenis hebben, sinus 0º = 0.
- Als de vectoren parallel zijn en tegengestelde richtingen hebben, sinus 180º = 0.
- Als de vectoren loodrecht staan, is sinus 90º = 1.
Wanneer een vectorproduct wordt uitgedrukt als een functie van zijn basisvectoren, hebben we:

Het puntproduct heeft de volgende eigenschappen:
- Het is niet commutatief: de volgorde van de vectoren verandert de scalair.
- Distributieve eigenschap: als een scalair wordt vermenigvuldigd met de som van twee vectoren, is deze gelijk aan de vermenigvuldiging van de scalair met elke vector.



Niemand heeft nog op dit artikel gereageerd.